在上一期的《7款百萬級SUV對比》文章中,七款豪華SUV在測試場地以及公路上進行了一番角逐,對它們的性能以及操控性有了一個全面的評定。不過既然是SUV對比文章,只是看公路性能還遠遠不夠,它們各自的四驅性能以及野外生存能力高低才是更重要的素質。所以,今天我們的第二期內容就是要把這7款車型拉進深山老林,來一次真實的山地穿越大考驗,這其中就包含了各種交叉軸狀態、爬坡以及碎石路段等幾個考察項目,通過這些測試,所有車型脫困能力的好壞就一目了然了。

● 測試車型四驅及設置簡介
在進入實戰之前,我們先來介紹一下各款車的四驅結構和設置。可別小看這個紙上談兵的環節,所謂實力決定表現。這些大家伙在之后的測試中能有怎樣的表現,看完下面的介紹大家也就能猜測出一二了。
1. 奧迪Q7 2013款 40TFSI 專享型
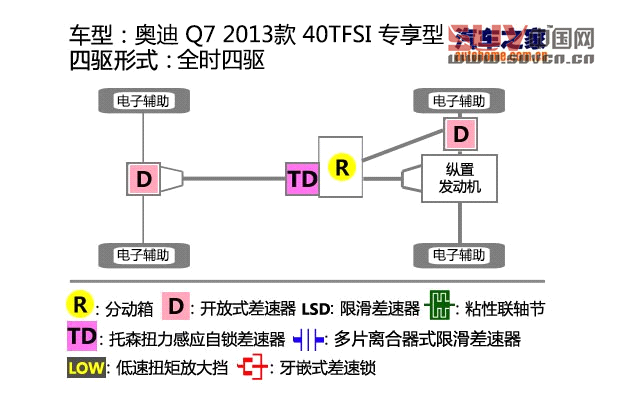
Q7采用的是標準的quattro全時四驅系統:前后橋之間的扭矩分配由托森差速器負責,而前后軸的輪間則都是普通的開放式差速器,當一側車輪出現打滑的時候完全依靠EDL對打滑車輪進行制動,來將動力傳向有附著力的車輪。

Q7的這套系統設置并不復雜,更多是依靠系統的自動控制。其駕駛模式分為lift(超級越野)、offroad(簡單越野)、comfort(舒適)、auto(自動)和dynamic(運動)共5種,空氣懸掛的高度則會依照不同模式自動調節。我們當然是將駕駛模式設為lift(超級越野),此模式下,Q7的最小離地間隙可升至240毫米,此時的接近角為24°,離去角為25°。
2. 寶馬X5 2013款 xDrive35i 豪華型
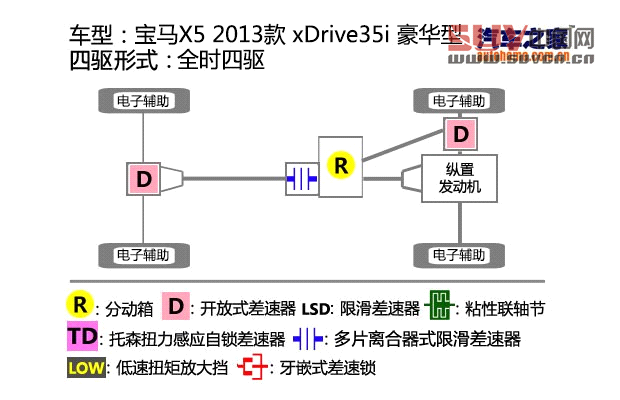
寶馬X5的xDrive與奧迪Q7的quattro在結構上的主要差別就是位于變速箱后方的中央差速器,quattro采用托森扭力感應自鎖差速器,而xDrive則采用比較常見的多片離合器式限滑差速器。兩者相比各有優勢,quattro的托森差速器為純機械結構,反應更迅速,而xDrive的多片離合器式差速器則能更靈活、主動的調節前后橋的動力。

從寶馬X5的車輛設置也可以很清楚的看清它的定位。對手都是各種越野模式選擇、各種車身高度調節,而寶馬X5除了一個下坡控制(HDC)外再無其它越野設置,所以無論是接下來的交叉軸架子爬坡測試還是最終的老掌溝之行,寶馬X5都不會進行任何單獨的設置。
3. 奔馳M級 2012款 ML350 豪華型

奔馳ML采用的4MATIC技術同樣使用多片離合器式中央差速器為核心部件,不過與幾位德系同門不同的是,奔馳ML還在分動箱內加入了一組低速齒輪,其減速比達到2.93:1,也就是將扭矩放大將近三倍,彌補了發動機扭矩偏小的劣勢。前后橋輪間全部采用開放式差速器,輪間限滑則完全依靠4ETS(四輪驅動電子牽引力控制系統)完成。
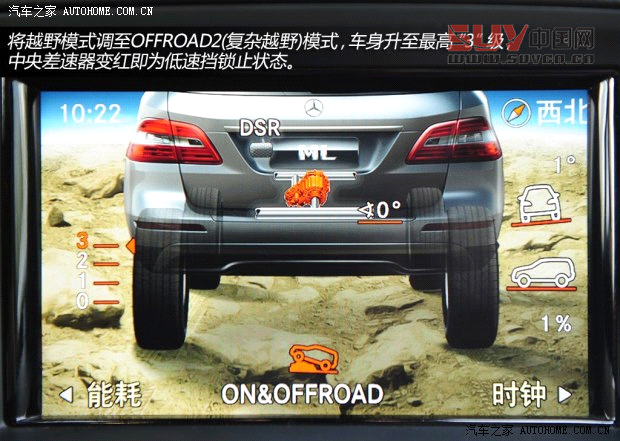

越野設置方面,奔馳同樣是德系廠家中最專業的一個。多路況適應系統組件(ON&OFFROAD package)擁有AUTO(自動)、SPORT(運動)、SNOW(雪地)、OFFROAD1(簡單越野)、OFFROAD2(復雜越野)、拖掛模式共5種駕駛模式可選。我們選擇OFFROAD2(復雜越野)模式進行越野,同時按下LOW RANGE按鍵,使車輛進入最強的低速四驅模式,此時中央差速器為鎖止。
4. 大眾途銳 2011款 3.0TSI V6 舒適型
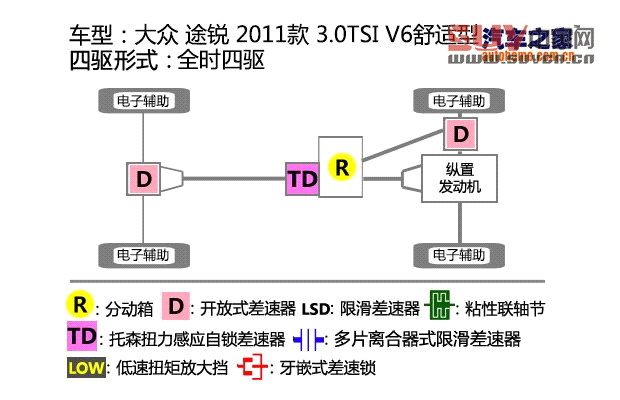


大眾途銳其實沒什么可說的了,它不僅和奧迪Q7的四驅結構完全相同,甚至很多部件都是相同的供貨商,所以在這里就不重復介紹了。車輛的設置同樣與Q7大同小異,只是叫法上有些區別。比如奧迪的運動模式叫“dynamic”,到途銳這就叫“sport”。我們在之后的越野測試中全部使用途銳的“特殊越野”模式,也就相當于Q7上的“lift”模式。此時空氣懸架會自動將車身升至最高狀態以保證車輛的通過性。
_ueditor_page_break_tag_5. 豐田蘭德酷路澤 2012款 4.6L 自動VX-R
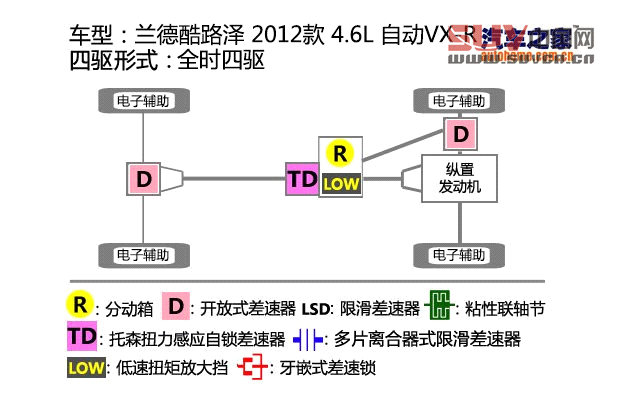
相比多款歐美豪華SUV,蘭德酷路澤的最大不同在于采用了非承載式車身,這讓其在車身剛性、耐用程度上可以得到更好的保證。同時為了進一步提高可靠性,蘭德酷路澤(LC200)還取消了可調節車身高度的空氣懸掛。

當然,蘭德酷路澤絕不是一輛簡單的、沒有技術含量的越野車。在我們這輛頂配車型上,蘭德酷路澤不僅裝備有托森中央差速器和帶低速擋的分動箱這些硬件配置,更是配備了諸如多地形可選駕駛輔助裝置(Multi Terrain Select)、動力調節懸架系統(KDSS)、低速巡航駕駛輔助系統(Crawl Control System)等多項實用的電子技術,使駕車越野的難度大大降低。我們此次測試時,蘭德酷路澤將主要采用巖石路面模式,同時開啟低速巡航駕駛輔助模式,駕駛員只需要控制好方向盤即可,油門和剎車則全部交由系統自己操作。
6. Jeep大切諾基 2014款 5.7L 旗艦尊崇版
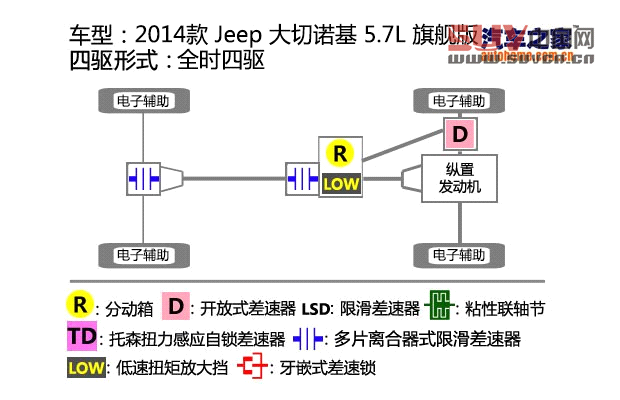
作為Jeep家族的旗艦豪華越野車,大切諾基在四驅結構上沒有讓我們失望,除了前后橋間的多片離合器式限滑差速器和輪上的BLD(制動限滑系統)外,其后橋的輪間也裝備了一套多片離合器式的限滑差速器。低速擋的傳動比達到2.72:1,保證了爬坡時的扭矩輸出。


越野設置方面,大切諾基擁有名為Select-Terrain的路況模式自選系統,可選擇包括AUTO(自動)、SAND(沙地模式)、MUD(泥地模式)、ROCK(巖石模式)、SNOW(雪地模式)共5種預設路況。新增的速度控制模式和蘭德酷路澤的低速巡航駕駛輔助系統(Crawl Control System)功能相似,車主設定好速度后,自己控制好方向即可。此次測試中大切諾基將以使用巖石模式為主,部分路段配合新增的速度控制模式。
7. 路虎第四代發現 2013款 5.0L V8 HSE
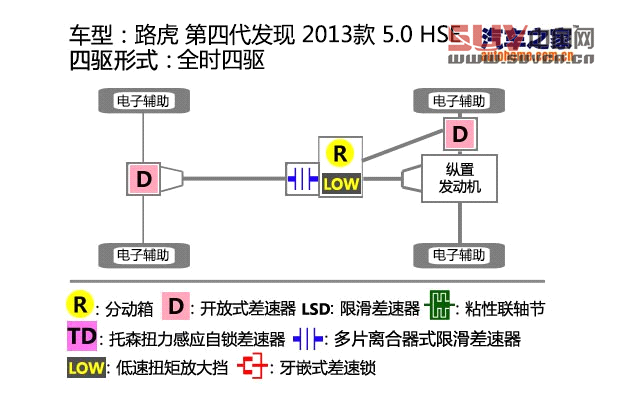
我們的這輛第四代發現前后橋均為開放式差速器,而前后橋間則裝備了多片離合器式的限滑差速器。在巖石模式下,中間差速器鎖止,低速四驅擋位下,扭矩可以放大3倍。


路虎是最早推出多地形越野模式選擇的廠商,所以它的這套全地形反饋適應系統也早已被我們熟知。五種模式分別為普通模式、草地/雪地模式、泥地/車轍模式、沙地模式和巖石攀爬模式,而我們此次測試中將會主要采用攀爬能力最強的巖石模式。
8. Jeep牧馬人 2013款 3.6L 四門羅賓漢
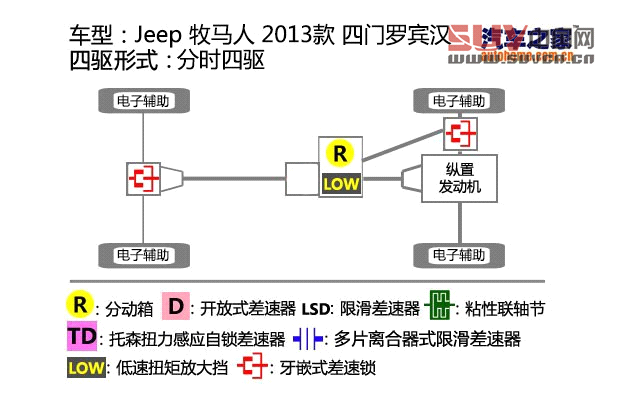
Jeep牧馬人四門羅賓漢版被我們拉來作為此次橫評越野項目的標桿,因為無論是車身結構還是四驅形式,它都是8款車型中性能最強的。前后橋的差速器均帶有差速鎖,中央分動箱同樣可以鎖定前后軸的轉速,再配合低速擋(扭矩可放大4倍)和作用于輪上的電子限滑,在量產越野車中,它的越野能力絕對是前三的水平。

采用分時四驅的羅賓漢可以在2H(高速兩驅)、4H(高速四驅)和4L(低速四驅),在進行項目測試時,主要采用的都是低速四驅模式,前后差速鎖全部鎖止。
_ueditor_page_break_tag_● 四驅理論性能測試——滑輪組攀爬(對角線車輪打滑)
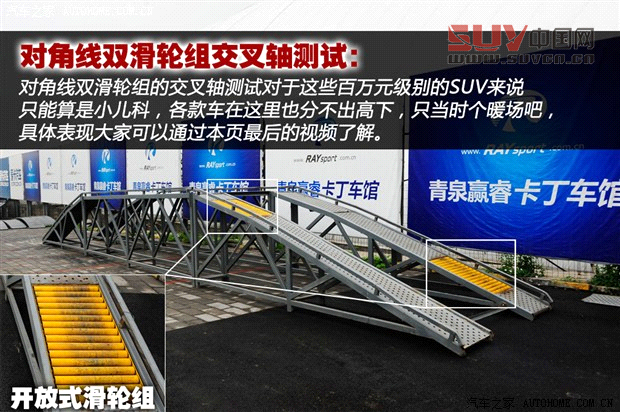
在進行山路實地測試之前,我們先來到了測試場地,用這里的器械進行一次模擬四驅性能測試,這些內容大家肯定也并不陌生,在我們之前的測試文章經能常看到。首先就是對角線滑輪組模擬交叉軸路況的測試。對于百萬級的SUV來說,這個項目實在是太過簡單,所以我們就不花篇幅贅述了,具體各款車的表現大家可以在本頁最后的視頻中看到,下面讓我們直接進入高難度測試。
● 四驅理論性能測試——滑輪組攀爬(三個車輪打滑)
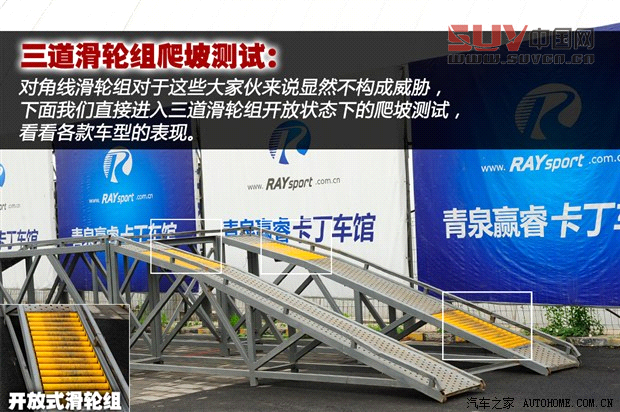
在大家集體平趟了對角線滑輪組攀爬測試后,下面要進行的可就是四驅理論性測試的終極考驗了。我們將右前方的滑輪組也打開,也就是說車輛將在僅有一個左后輪擁有附著力的情況下進行攀爬,實際難度幾乎是增加了一倍。由于多款車型都沒有輪間限滑的機械裝置,對車輛的電子限滑能力以及單個車輪所能分配到的扭力都是個不小的挑戰。
Jeep牧馬人 2013款 3.6L 四門羅賓漢

最先出場的還是我們的客串嘉賓牧馬人。在分動箱掛入四驅模式(前后軸硬鏈接),同時鎖定前后兩把差速鎖的情況下,實際上牧馬人的四個車輪只能進行相同轉速的運動,所以整個攀爬過程中,牧馬人的車輪都沒有任何的打滑,面對最難的理論性測試,牧馬人依然如履平地。
奧迪Q7 2013款 40TFSI 專享型

下面開始就是正式隊員了,奧迪Q7的前后橋均為開放式差速器,不過強大的EDL輪間限滑能力在短暫的打滑后很快就制動了打滑的車輪,為唯一擁有附著力的左后輪提供了足夠的動力,最終奧迪Q7還是順利的完成了攀爬。
寶馬X5 2013款 xDrive35i 豪華型

寶馬的X5面對三道滑輪組時顯得有些狼狽,三個失去附著力的輪胎始終處于空轉和打滑的狀態,而左后輪則沒能分配到足夠的動力帶領車輛前進,在經過幾次努力之后依然看不到通過的希望,最終宣告失敗。
奔馳M級 2012款 ML350 豪華型

ML350對于打滑輪的制動力并不是很強,在整個爬坡過程中,4ETS(四輪驅動電子牽引力控制系統)并沒有完全抑制車輪空轉的現象,不過最終,左后輪的牽引力依然足以幫助ML350通過這個項目。
大眾途銳 2011款 3.0TSI V6 舒適型

與奧迪Q7結構、功能都十分相似的途銳在面對三個滑輪組時表現的十分淡定,沒有附著力的車輪幾乎剛要空轉即被電子限滑系統制動,車輛登頂的過程非常順暢。
豐田蘭德酷路澤 2012款 4.6L 自動VX-R

蘭德酷路澤是參賽隊員中唯一一個面對三道滑輪組依然如履平地的選手,在開啟了低速四驅并啟動低速巡航駕駛輔助系統(Crawl Control System)后,駕駛者只需要握好方向盤即可,蘭德酷路澤會自動控制車速,四個車輪也像是被機械差速鎖鎖住一樣,跟走平地似的通過了測試。
Jeep大切諾基 2014款 5.7L 旗艦尊崇版

大切諾基是幾款測試車中最冤的一個,它的電子限滑、驅動力分配做得還不錯,能夠看到空轉的車輪被制動,四個車輪幾乎保持一致的轉速轉動。怎奈大切諾基有個豬一樣的隊友,裝備的這四條輪胎抓地力不足,左后輪幾乎磨的不能測試了才勉強讓大切諾基完成了一次測試。
路虎第四代發現 2013款 5.0L V8 HSE

路虎的第四代發現在交叉軸滑輪組測試中顯得有些踉蹌,沒想到它在三道滑輪組上的表現反而要更出色一些。失去附著力的三個車輪很快被叫停,左后輪則一肩扛起體重超過兩噸的車身,順利的攀爬至坡頂。
_ueditor_page_break_tag_剛剛的場地測試只是小試牛刀,畢竟用器械模擬出來的理論狀態并不能完全說明問題,實際越野道路中復雜多變的路面狀況才是它們展示自己硬實力的地方。為了讓這些百萬級豪華SUV的越野能力得到充分的展示,我們來到了河北省沽源縣的老掌溝,在這里它們將面對各種嚴苛的路況,誰的四驅脫困能力最好?誰的野外生存能力更強?今天即將見分曉。
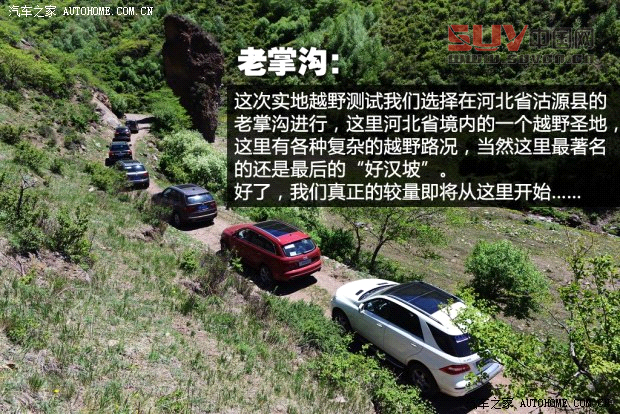
老掌溝(點擊查看相關內容介紹)是河北省境內一個有名的越野圣地,溝內包含了絕大部分的越野路況,不少汽車之家論壇的車友也都曾經在這里有過穿越的經歷(點擊查看),大家都以征服最后的“好漢坡”為最終目標。對于一輛越野車來說這里絕對算是一個嚴格的“考場”,想要從這里順利穿越需要具備一定的實力,這些百萬級SUV的真正較量也將從這里開始……

隨著穿越的深入,道路的難度也在逐漸增加,其中交叉軸是最常見的一種狀態,這對于越野車的四驅系統脫困能力是個比較嚴格的考驗,前面的場地測試我們也模擬了這種狀態,除了前后軸的扭矩分配之外,最重要的還是左右輪間的限滑能力,這要求車輛需要具備輪間的鎖止機構或者電子輔助制動系統,否則即使鎖止了中央差速器,車輛仍然無法脫困。
實地越野測試項目(1)——交叉軸
現在圖中所展示的就是我們在穿越老掌溝過程中遇到的兩個典型的交叉軸狀態,除了前面說的四驅系統輪間限滑能力之外,對于車輛的底盤高度、懸架行程、輪胎附著力都有一定的考驗。
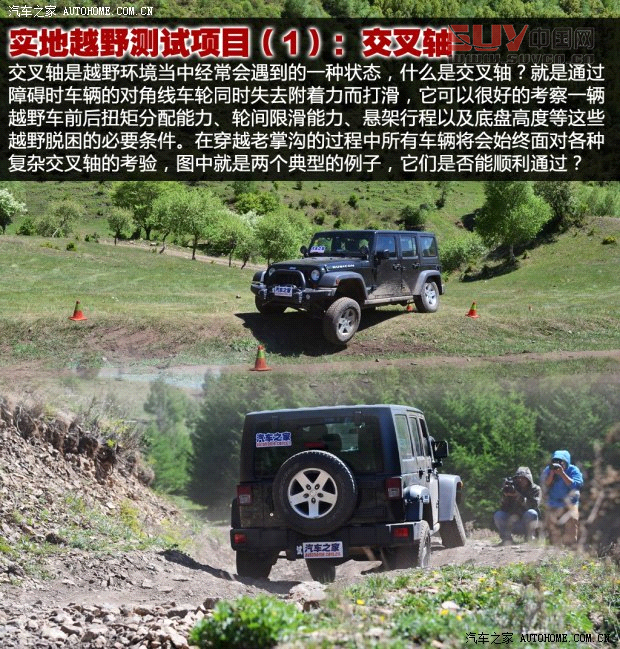
在正式測試開始之前,我們的標桿牧馬人要首先通過障礙,毫無疑問,它這種路況毫無壓力,底盤高度絕對夠高,整體式車橋讓本來就很長的懸架行程充分拉伸,在通過障礙的整個過程中四個車輪沒有產生任何滑動,扭矩平均分配到四個車輪上,絕對不會有打滑的現象,輕松順利通過障礙,絕對完美的表現。
接下來就是我們的7款百萬級豪華SUV登場了,測試之前所有車型均調整至各自最強的越野模式、最高車身高度,并且為了測試四驅系統的能力極限,所有車型都是緩慢通過,車速保持在5~10km/h之間,避免車速過快導致利用慣性通過障礙。車型出場順序按品牌名稱首字母排序,與最終越野測試得分排名無關。
奧迪Q7:

奧迪Q7憑借著自己名字的優勢搶在了第一個登場,它的越野操作非常簡單,除了底盤升降之外沒有任何可以調節的地方,駕駛員只要把握方向,踩下油門即可,這在越野時可以讓駕駛員更專注于路面狀況。空氣懸架讓它有了不錯的底盤高度,通過性沒任何問題。在面對交叉軸狀態時,中央托森差速器可以很好的完成前后軸扭矩分配的任務,并且純機械結構穩定可靠。不過它不具備輪間鎖止能力,輪間限滑功能是靠電子輔助制動來實現,制動效果和制動時機還都說的過去,最終效果表現在幾款車型當中屬于居中的水平。當然,Q7的輪胎仍然讓人緊張,35扁平比的輪胎已經被碾壓到了極限,我們還是祈禱它能夠順利穿越老掌溝吧。
寶馬X5:
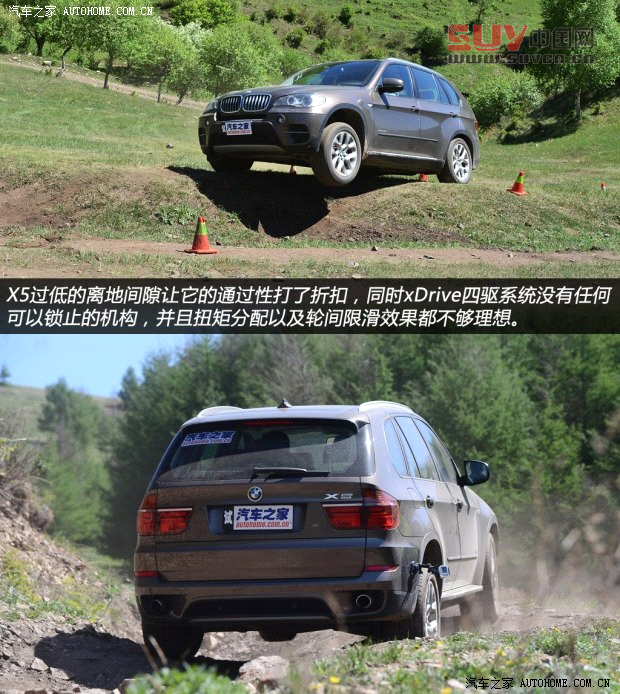
寶馬X5在上一篇的公路駕駛和性能部分高高興興的拿了第一名,可今天來到了大山里就沒那么瀟灑了,懸掛高度不夠、沒有底盤升降,X5的通過性大打折扣,在通過斜坡交叉軸時就遇到了托底的情況,這對于越野車來說絕對是個致命問題。另外,在交叉軸狀態當中,X5的xDrive四驅系統扭矩分配不夠好,中央多片離合器差速器無法完全鎖止,輪間限滑同樣依靠電子輔助制動,但對打滑車輪的制動力度不夠,能看到車輪是始終在打滑中通過障礙。同時由于偏公路性能的輪胎在非鋪裝路面的附著力一般,在交叉軸狀態中有附著力的車輪也會出現明顯的打滑情況。綜合來看,寶馬X5的脫困能力在這些車型當中墊底,它是否能完成最終的穿越任務,通過好漢坡,我們在心里打了個大大的問號。
奔馳ML:
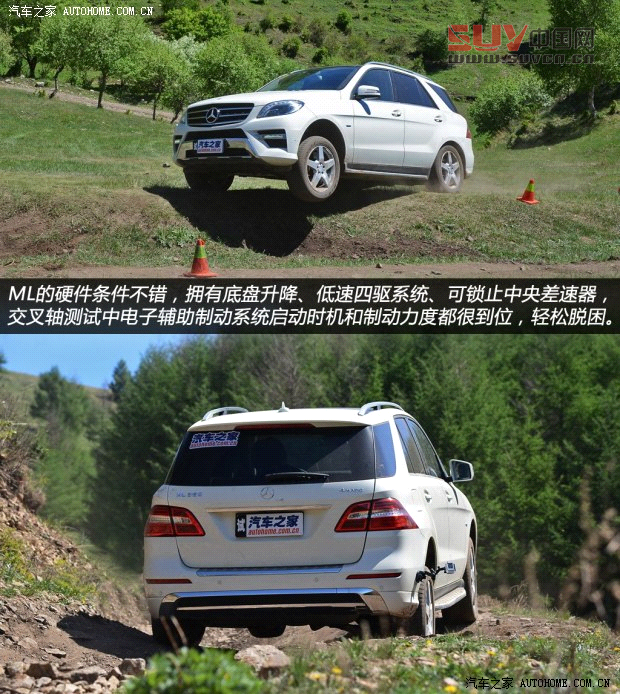
奔馳ML有著很好的越野底子,4MATIC四輪驅動系統、4ETS四輪電子牽引力控制、帶有低速扭矩放大的分動箱、可鎖止中央差速器、多路況系統、底盤升降,這些加起來讓ML的越野脫困能力上升到了一定的水平。在交叉軸障礙的實際表現中,ML底盤高度表現一般,基本的障礙通過性沒問題,可鎖止的中央差速器能固定前后50:50的扭矩分配,4ETS系統在車輪出現打滑時可以有效制動,制動時機和效果都非常好,在通過兩個交叉軸障礙的過程中ML都很輕松,車輪都沒有出現明顯的打滑狀況,脫困能力要比奧迪Q7更強。
大眾途銳:

其實途銳在四驅結構上與奧迪Q7很相似,都是以中央托森差速器為核心的四驅系統,依靠車輪電子輔助制動來實現輪間限滑功能,只不過這套系統在大眾這里被叫做4MOTION。另外,途銳也具備底盤升降功能,并且最高狀態下離地間隙可以達到300mm,僅次于路虎發現,是對比車型中底盤離地間隙第二高的車型,這大大提高了途銳的通過性,另外它255/60 R17尺寸的SUV專用輪胎也對越野有很大幫助。實際通過交叉軸障礙時途銳的表現與Q7相似,輔助制動系統對車輪的制動效果都不夠明顯、不夠及時,和奔馳ML那種干脆利索的制動效果還是有一定差距,不過這種程度足以讓途銳通過障礙。
豐田蘭德酷路澤:
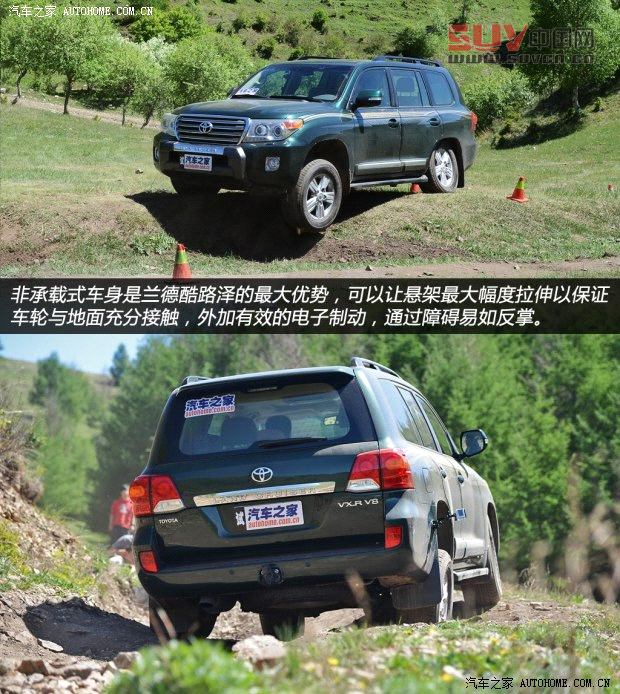
蘭德酷路澤可以說是除了牧馬人之外另一個越野傳奇車型了,屬于硬派越野車一類,它的能力絕對不會有人懷疑。它采用托森中央差速器,帶扭矩放大的中央分動箱、前后軸開放式差速器,帶車輪電子輔助制動系統。從LC200時代開始,蘭德酷路澤就取消了空氣懸架,據說是為了保證車輛可靠性,雖說現在的最大離地間隙只有225mm,但通過KDSS系統的輔助,能更大程度拉伸懸架行程,最大限度保證車輪與地面充分接觸,這點從通過交叉軸時的狀態就能看到。在對打滑車輪的制動上,雖然前后軸都沒有鎖止機構,但電子輔助制動系統的效果非常好,可以幾乎不讓車輪打滑就通過交叉軸。當然,裝備了后橋機械式差速鎖的中東版車型在越野性能上又更進一步,可靠性更高,可惜中國消費者無福消受了。
Jeep大切諾基

從硬件水平來看,大切諾基是這幾款車型當中最強的一個,底盤升降、低速四驅擋、可鎖止中央差速器、后橋電子限滑差速器(可100%鎖止)、車輪電子輔助制動系統,另外全新大切諾基還裝備了可以和路虎媲美的Selec-Terrain地形反饋系統,這些裝備讓它在交叉軸項目當中有著很好的表現。極限狀態下285mm的離地間隙足夠應付眼前的障礙,測試時我們選擇了大切諾基的巖石模式,這時系統會自動鎖止中央及后橋差速器,能看到在遇到交叉軸狀態時大切諾基的表現很從容,即使前軸一側車輪出現空轉,電子系統也會及時介入,可見它的四驅系統在動力分配上表現很好。
如果仔細觀察能發現,大切諾基在通過交叉軸時,偶爾會遇到前軸或者后軸車輪同步打滑的狀態,很明顯這時候四驅系統已經很好的完成了扭矩分配的任務,但由于大切諾基搭配的輪胎附著力不夠才會出現這種狀態。這對于越野車來說是個很嚴重的問題,輪胎附著力直接影響四驅效果,即使你可以做到扭矩平均分配到四個車輪上,可輪胎不能牢牢抓住地面,你仍然無法脫困。
路虎第四代發現:

路虎發現也是個天生的越野好手,底盤升降、可鎖止中央差速器、帶低速四驅擋中央分動箱,車輪電子輔助制動系統,在這些硬件條件的基礎上,全地形反饋系統來對他們進行統一的調配,這大大簡化了駕駛員的操作。在我們的實地交叉軸測試當中,選擇了最強的巖石攀爬模式,這時候系統會鎖止中央差速器,固定了前后橋的扭矩平均分配,而當車輪剛剛出現打滑或者懸空狀態時,輔助制動系統就會果斷介入,幫助車輛順利脫困,從整個通過交叉軸障礙的過程看第四代發現幾乎沒有車輪打滑的跡象,表現和蘭德酷路澤不相上下。
_ueditor_page_break_tag_實地越野測試項目(2)——U型溝
在車隊成功通過了兩個交叉軸之后不久,我們又碰到了難題,就是眼前的這個深溝。在穿越過程中這類的溝槽是除了交叉軸之外也很常見的路況,一些深度和角度都比較小的溝槽不會對這些SUV帶來太多困擾,但像這種角度很大的深溝就對車輛有一定要求了。首先就是接近和離去角,如果角度不夠前后保險杠難免會受到損傷,甚至無法順利前行,另外車輛的爬坡能力要很強,深溝兩側的斜坡看似平坦,其實路面都是附著力比較低的沙土地,另外路面也并不完全平整,這里可以很好的考察車輛四驅系統的扭矩合理分配能力、動力輸出以及輪胎附著力。

現在所有車輛都已經準備就緒,測試馬上開始,還是像剛才一樣,都調制到各自最強越野模式、最高車身高度,通過深溝的車速始終保持在5~10km/h勻速同行,這樣就看出車型之間能力的差別,避免因為速度過快,靠慣性通過障礙。
Jeep牧馬人四門版羅賓漢

標桿牧馬人率先踏入場地。盡管是個很有難度的項目,但在牧馬人面前一切都變得簡單了,我們使用的四門版羅賓漢車型擁有38.4°的接近角和31.4°的離去角,毫無壓力,鎖定前后差速鎖,切換低速四驅模式,4:1的扭矩放大讓它有足夠的爬坡動力,實際測試時我們幾乎不需要踩油門就可以順利通過深溝爬上坡頂,又是一次完美的演示。
奧迪Q7:

第一個登場的還是Q7,剛才的交叉軸項目它順利完成,只是那套超低扁平比的輪胎讓人有些擔心,現在深溝測試對于輪胎的壓力要小很多,暫時不用太擔心爆胎的問題。盡管Q7的空氣懸架可以提升車身高度,可是過長的前懸以及后懸讓它的接近角和離去角成為了弱項,特別是接近角,通過溝底時離地面只有很小的間隙,如果斜坡角度再大一些恐怕都很難通過了。
在另一側的爬坡過程中Q7的四驅系統仍然盡職盡責,機械式的托森差速器可以很好的分配前后扭矩,但沒有低速四驅擋的Q7在爬坡時的動力稍顯不足,中間會有一些停頓,另外四條純公路運動輪胎抓地力比我們想象中略好一些,沒有出現過分的打滑,即使有打滑也被輔助制動系統及時遏制,最終Q7順利通過了深溝。
寶馬X5:

這個障礙對于寶馬X5來說似乎要比剛才的交叉軸難度更大,首先面臨的就是接近角和離去角問題,它與Q7的情況不同,它本身沒有底盤升降功能,而原車底盤離地間隙也只有222mm,所以在駛入溝底的時候需要極其小心,最后保險杠是擦著地面通過了溝底,大家也都松了口氣。
不過接下來要面對的爬坡又讓X5犯難了,四條公路輪胎遇到了坡道中間的沙土之后開始嚴重打滑,這時四驅系統在盡力地分配前后軸扭矩,但電子輔助制動系統不能很好的對打滑車輪進行制動,外加沒有低速四驅擋,本來就不是很充足的動力也都被打滑車輪浪費掉了。就這樣寶馬X5第一次爬坡失敗了,可這里是必經之路,必須通過障礙,無奈之下X5只能選擇在爬坡之前稍稍加速沖上斜坡,利用一定的慣性艱難通過。
奔馳ML:

奔馳ML在底盤最高模式下通過深溝也沒有任何問題,接近角和離去角都還有很大余量,在爬坡過程中ML展現了低速四驅擋的優勢,2.93:1的減速比雖然比不上牧馬人,但也足夠把它推上坡頂。在遇到坡道中間的松土時,輪胎出現了短暫的打滑,不過輔助制動系統良好的制動效果及時發揮作用,對打滑車輪進行制動,最終ML也是順利爬上坡頂。
大眾途銳:

途銳在特殊越野模式下的車身離地間隙達到300mm,同為33°的接近角和離去角也在7款SUV中數一數二,通過U型溝相當輕松。途銳最大的問題在于電子系統對于動力輸出的限制,爬坡過程中即便是全油門,也能明顯感覺到動力并非全力輸出,發動機轉速也只會在3500轉左右徘徊,動力不足反而成了途銳爬坡遇到的最大問題。四驅系統的表現基本還算合格,畢竟是純機械的托森結構,扭矩分配不用擔心,就是遇到輪胎打滑時對車輪的制動效果不夠理想,這點和在交叉軸時的表現一樣,最終還是通過了深溝,表現比X5還是要強不少,但是比Q7要略差一些。
豐田蘭德酷路澤:

對于蘭德酷路澤,在這個項目上除了接近角和離去角之外,其他一點都不用擔心會出問題,龐大車身和過長的前懸、后懸讓它的接近角只有25°,離去角僅僅為20°,甚至比X5的還要更小。小心的駛入溝底之后,爬坡對于它就是太輕松了。我們選擇了蘭德酷路澤的低速巡航駕駛輔助模式,這時就不需要駕駛員去踩油門,只要把握好方向盤,車輛會自動開始爬坡,車速始終保持在5km/h左右,電子輔助制動系統會不斷對車輪進行干預,制動頻次比在交叉軸測試時要高,這樣可以提早防止車輪出現附著力不足而打滑的情況,同時低速四驅擋讓爬坡動力充足,最終蘭德酷路澤是以緩慢而輕松的狀態爬上坡頂,輪胎未出現任何打滑現象,可以和牧馬人媲美的表現。
Jeep大切諾基:

硬件裝備很強的大切諾基在交叉軸測試當中有著不錯的表現,現在面對這個U型深溝它應該也不會有太大問題。底盤升至最高,接近角比途銳更好,離去角稍小,但不影響通過性。爬坡時我們同樣選擇巖石模式,中央和后橋差速鎖全都鎖定,動力分配依然很好,強大的5.7L發動機的扭矩輸出足夠,在配合低速四驅模式2.72:1的傳動比,動力相當充足,開始我們還擔心大切諾基過重的車頭會影響爬坡效果,實際上它的表現比我們預想的更從容,車輪幾乎沒有打滑,順利平穩爬上坡頂。
路虎第四代發現:

路虎發現的接近角是除了牧馬人之外最大的一個,這是它的一大優勢,一般的越野路況都不會給他帶來困擾,通過這個深溝也是易如反掌。爬坡時將全地形反饋系統調至巖石攀爬模式,系統自動鎖定中央差速器,開啟低速四驅模式,爬坡過程中車輪沒有出現任何打滑,都無需輔助制動系統的干預就輕松爬上坡頂。
測試項目小結:
在U型溝的測試中,整體來看這些車輛表現和我們預期的相符,除了寶馬X5是利用一定的慣性通過,其他車型均順利完成,其中蘭德酷路澤、第四代發現、ML和大切諾基都是輕松平穩通過,而Q7和途銳因為不具備低速四驅擋,中途動力有些不足,但也能完成項目,并且到目前為止,Q7的四條超大號公路輪胎還沒有出現任何問題,讓人很欣慰。
_ueditor_page_break_tag_實地越野測試項目(3)終結考驗——好漢坡
在經過了U型溝之后,我們的老掌溝穿越也進行了一大半,有了剛才幾個項目的考驗之后,我們對這些車輛也更有信心,前面不遠處就是我們這次的終極測試項目——好漢坡。從圖中看好漢坡似乎只是個超大的爬坡項目,其實近距離觀察一下,路況比看上去要復雜的多。

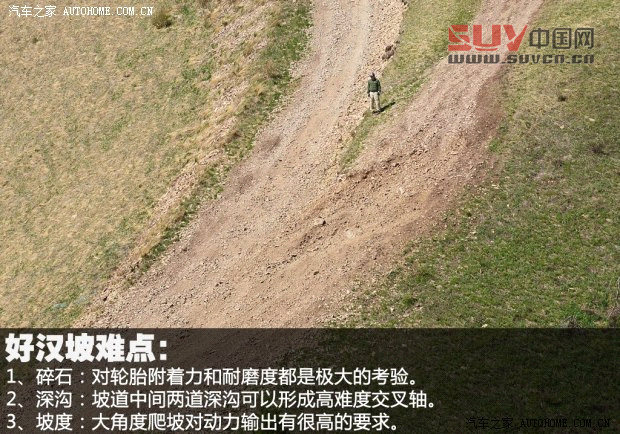
在道路分叉點那里是好漢坡最難的地方,這里布滿了大大小小各種碎石,并且中間是兩道斜向的溝槽,車輛通過這里必須要形成兩次交叉軸,另外這里還是處于大角度的爬坡狀態。總結一下好漢坡就是一個碎石地大角度交叉軸爬坡項目,它綜合了前面我們遇到的所有項目,這對車輛綜合脫困能力是個全面的考察,在這里所有的車都將面對最嚴酷的考驗,越野能力的強弱將直接體現出差別。面對這樣的項目,大家剛剛有些放松的心情又立刻開始緊張。


正當大家看著好漢坡渾身緊張的準備測試的時候,我們擔心的事情還是發生了,那輛裝著21寸輪胎的Q7爆胎了,它遺憾的倒在了好漢坡腳下。其實這也是大家意料之中的事情,畢竟295/35 R21的超薄公路輪胎根本無法完成如此艱難的越野任務,只是它一路堅持走到了這里,馬上就要面臨終極考驗了,并且前面的所有項目Q7表現都還不錯,起碼證明了他的四驅系統以及輪間限滑能力都不弱,實在讓人惋惜。那現在Q7只能遺憾的退賽了,它原廠配備的折疊小備胎也無法應對眼前的高強度行駛狀態,只能眼睜睜看著其他幾個選手一爭高下了。
經歷了Q7的意外之后,我們的測試也正式開始,面對這樣的難度,所有選手們也都用上了自己所有的看家本領,讓自己保持在最強的越野狀態,而且這個項目我們同樣是緩慢勻速通過,看看誰能憑借自己的真實實力完成測試,如果是帶速度沖坡的話,我們就無法分辨出真實的四驅性能的高低了。
Jeep牧馬人四門版羅賓漢

充當先鋒的依然是牧馬人,既然是標桿總要起個模范帶頭作用。最強狀態下的牧馬人絕對是個越野的利器,好漢坡中間兩道溝槽形成的交叉軸絲毫沒對它產生影響,唯一有些困難的就是碎石路面,即使它四個車輪都能平均分配到動力,但遇到碎石也會出現打滑,好在牧馬人的越野專用輪胎在碎石路面上有著不錯的附著力,最終沒費太大力氣就通過了碎石路段,再往上走的爬坡就毫無難度了。
寶馬X5:
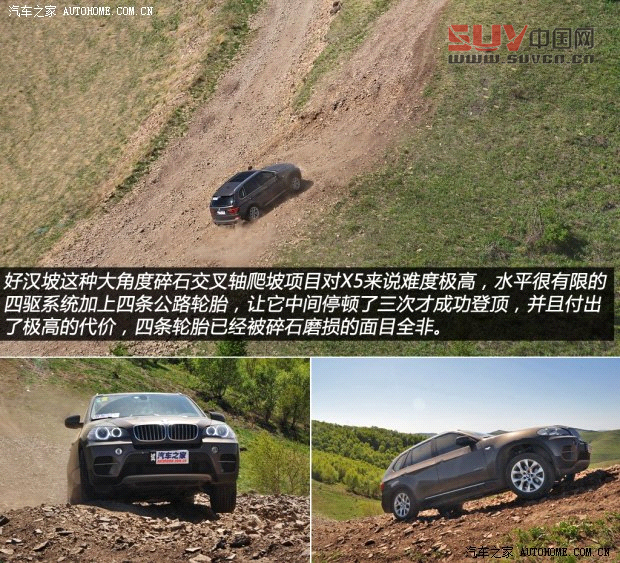
Q7退出之后讓寶馬X5成為了第一個登場的選手,之前的測試已經基本看出了它的水平,這個對越野不怎么在行的車型面對眼前的挑戰,說實話我們真是沒有太多信心。在攀爬好漢坡的過程中,基本上都是高難度的碎石爬坡交叉軸狀態,X5附著力很差的公路輪胎只能在碎石當中無助的空轉,有限的輪間限滑能力也無法幫助其脫困,整個過程中出現了三次這種停頓空轉的狀態,第三次時發動機還出現了過熱現象,我們只能原地停車等待,此時所有人都認為X5爬上好漢坡已經是不可能的事情了。充分的休息之后X5的狀態不錯,最終它極為艱難的爬上了好漢坡。盡管爬坡成功,可X5的表現實在是勉強,并且代價也是相當大,在爬上坡頂后,它的四條公路輪胎已經面目全非,慘不忍睹。
奔馳ML:

接下來上場的是奔馳ML,之前的表現證明了它擁有出色的脫困能力,并且熟悉汽車之家游記的朋友都知道,去年秋天ML已經征服過一次好漢坡,這次它又來到這里,我們自然也對它有了更多的信心,但是現在這里的路況已經比當時更加惡劣,它的表現也沒有了當初那么從容,爬坡過程中也曾出現了輪胎在碎石中空轉的情況,不過經過一番掙扎之后ML還是順利完成了項目。整體來看ML在爬坡過程中還是很穩健,四驅系統完全能夠合理分配扭矩,并且輔助制動系統對車輪的制動效果非常好,能幫助ML順利脫困,并且整個過程中沒出現任何機械和電子故障,輪胎也完好無損。
大眾途銳:

途銳在面對好漢坡的挑戰時遠遠沒有奔馳ML那么從容淡定,盡管底盤高度和輪胎都能勝任這種碎石爬坡路段,四驅系統也能分配好前后軸的扭矩輸出,但沒有低速四驅擋讓它在這種大角度碎石爬坡路況中有些力不從心。在U形槽上遇到的電子系統限制輸出的問題在這里同樣存在,而且更加明顯。原本就不充沛的扭矩在經過電子系統的限制后變得不足以帶動車輛脫困,中途經過了三次車輪空轉的狀態之后,途銳的變速箱報警了,我們也只好讓它充分休息一下,再次啟動之后,借著變速箱還未進入保護模式,一鼓作氣,登上了坡頂,過程中輪胎也是始終在碎石當中攪動著,不過它的狀態要比X5更強一些。
豐田蘭德酷路澤:

蘭德酷路澤在野外總能給人一種安全感,前幾項的測試它確實展示出了自己在越野上的硬實力,爬好漢坡自然也會信心滿滿,手動鎖定中央差速鎖,選擇低速四驅,蘭德酷路澤邁著穩健的步伐向坡頂進發。無論是四驅系統、輪間限滑能力還是輪胎,它的表現都是完美的,可它有一個先天不足的問題就是車身實在太重了,在碎石交叉軸路況下,如果車輪空轉打滑就會出現側滑,這時要及時收油,控制好方向之后加油前進,最后還是順利通過了好漢坡。車重給蘭德酷路澤帶來了小小的困擾,但不是問題,整體來看它在好漢坡的挑戰中表現還是非常出色的。
Jeep大切諾基:

前面的幾項測試大切諾基表現都不錯,現在真正的挑戰開始了,最強的巖石模式下,中、后差速鎖鎖定,進入低速四驅擋,加之強大的發動機動力,整體扭矩輸出非常好。攀爬過程中四驅系統的動力分配以及輔助制動系統的發揮都很正常,問題還是出在輪胎上,前面的交叉軸測試我們就說過大切諾基的輪胎存在一些抓地力不足的情況,現在好漢坡測試再次證明了這點,碎石坡面上根本不能提供良好的附著力,中間很容易就陷入了輪胎在石堆中空轉的狀態,如此反復了幾次之后,終于登上了坡頂,它的狀態顯然沒有蘭德酷路澤和ML那么從容,不過還好沒有出現任何機械和電子的故障。
路虎第四代發現:

有了前面測試中出色的表現,第四代發現也讓人充滿信心,全地形反饋系統選擇巖石攀爬模式,整個爬坡過程都很穩健,輪胎雖然也會出現打滑空轉,但并沒有阻礙它前進,電子系統始終在發揮作用,對打滑車輪進行有效制動,而輪胎在碎石路面也有著足夠的附著力,最后第四代發現順暢的成登上坡頂,整體狀態與蘭德酷路澤不相上下。
測試項目小結:
在面對好漢坡的終極挑戰時,所有車輛的表現都已經不再像前面測試時那么輕松,大家都展示出了自己所有的能力,而這也是我們好漢坡挑戰的意義,就是要看看在面對這種極限越野路況時大家脫困能力的差別。橫向比較一下,蘭德酷路澤和第四代發現的表現要明顯好于其他車型,通過好漢坡幾乎沒有都是一路順利前行,他們的四驅系統和輪胎都經受住了考驗。之后就是ML和大切諾基,它們兩個水平相當,ML還要略好一些,優勢就在于輪胎上。再往后就是途銳和X5,途銳在四驅系統能力和底盤高度、輪胎方面都要強于X5,綜合水平也是在X5之上,但要和ML相比還有差距,和蘭德酷路澤那更是相差甚遠。表現最差的當然就是X5,這個大家早有心理準備。
_ueditor_page_break_tag_越野測試項目排名:
在完成了好漢坡項目之后,至此我們的老掌溝山地穿越測試也全部結束了,結合前面的測試項目以及最后的終極挑戰,我們也要像第一期的公路篇那樣,給所有這些車型的越野能力打一個分數。仍然是之前參與公路項目的三個評委,現在他們又來到了越野場地全程跟蹤測試過程,根據車輛的狀態給每輛車打分,三個評委的平均分數就是這輛車在這次越野性能方面的得分,滿分仍然為10分。
第一名:豐田蘭德酷路澤 得分:9.2

蘭德酷路澤在我們心中早已是一款有著傳奇色彩的專業級越野車,所以它在今天的越野性能測試部分拿到第一名一點都不讓人意外,三名評委分別打出了9分、9分、9.5分的成績。在所有的測試項目中它的表現的都非常穩健,無論是硬件還是軟件水平都相當出色,唯一遺憾的就是如今蘭德酷路澤沒有了底盤升降功能,并且接近角和離去角不夠理想,不過這似乎并沒有過多影響它的通過性,開著它走在路上永遠都會讓你信心滿滿。
并列第一名:路虎第四代發現 得分:9.2

第四代發現同樣可以屬于一款優秀的專業級越野車,非承載式車身能夠有效保證越野強度,其他的硬件及軟件條件也很出色,它擁有底盤升降功能,擁有非常不錯的接近角和離去角,這些因素讓它能夠和蘭德酷路澤平起平坐。最終第四代發現也得到了9分、9分、9.5分,平均分9.2的成績,與蘭德酷路澤并列第一名,也算是當之無愧。
第三名:奔馳ML 得分:8.2

奔馳雖然很少宣傳他們SUV產品的越野性能,但不可否認奔馳在越野方面絕對是一流水平。ML在這次測試中獲得了8分、8分、8.5分,平均8.2分的成績,僅次于蘭德酷路澤和第四代發現,屬于中上等水平,ML在硬件和軟件條件上沒有前兩名那么硬,不過整體水平已經算是比較出色的,它的缺點是底盤高度不夠理想,但也不影響通過性。
第四名:Jeep大切諾基 得分:7.5

大切諾基有著非常不錯的先天條件,四驅系統可以說是這些車型當中最好的一個,如果綜合硬件及軟件水平來看它絕對不比ML差。不過從實際測試當中能看到,大切諾基的輪胎成為了短板,影響了其脫困能力,也正因如此我們三名評委都給出了7.5分的成績,而如果不是受輪胎影響的話它的分數還會更高一些。
第五名:大眾途銳 得分:7.3

途銳今天能有這樣的表現確實讓我們有些意外,它這個看起來外表最柔弱的車型其實還有著一定的脫困能力,整體表現與大切諾基相當,但它的硬件水平實在是一般,沒有低速四驅,輪間限滑效果也不夠理想,另外動力輸出還有受到變速箱保護的影響,所以它還是一款更適合公路的產品。
第六名:寶馬X5 得分:5.2

很無奈,公路上風光無限的寶馬X5,來到了野地里就完全失去了斗志,它只得到了5分、5分、5.5分,平均5.2分的成績,各項測試當中它都完成的比較吃力,甚至到最后的終極挑戰中的表現實在是很狼狽。不過話說回來,X5有這樣的表現倒是讓我們很意外,本以為它可能都無法完成這次穿越,實際上它還是堅持完成了任務,作為一款公路SUV,這樣的越野表現也算是可以了。
奧迪Q7 得分:5.2分

奧迪Q7最終越野項目綜合得分為5.2分,與寶馬X5并列最后一名。大家可能奇怪為什么Q7在越野能力比X5更好的情況下,得分卻和X5相同?確實Q7的實際越野表現并不差,三位評委都打了7分,平均得分7分,但實際上由于爆胎,它比X5少完成一項“好漢坡”的終極考驗,在這個前提下得分比X5高是不合理的,因此編輯部總編室決定,把Q7的最終得分定為與X5相同的5.2分。我們認為如果能給Q7換上一套合適的鞋,越野性能應該會有更好的表現,終極考驗也有希望順利通過,可現在只能是留下遺憾了。
| 越野測試得分 | ||||
| 車型 | 胡正暘打分 | 王苦公打分 | 羅浩打分 | 最終分(平均分) |
| 蘭德酷路澤 | 9 | 9.5 | 9 | 9.2 |
| 第四代發現 | 9 | 9.5 | 9 | 9.2 |
| ML350 | 8 | 8 | 8.5 | 8.2 |
| 大切諾基 | 7.5 | 7.5 | 7.5 | 7.5 |
| 途銳 | 7.5 | 7.5 | 7 | 7.3 |
| X5 | 5 | 5.5 | 5 | 5.2 |
| Q7(未完成) | 7 | 7 | 7 | 5.2 |
總結:
到這里我們百萬級SUV橫評第二期的內容就全部結束了,這次的老掌溝山地穿越絕對會讓你記憶深刻,畢竟對于這些豪華SUV產品來說,大多數人對它們的印象還是公路上的光鮮亮麗,而像今天這樣滿身泥土、亂石飛濺的場景平時是難得一見的,即使你已經擁有了一輛豪華SUV,可能也不會想到用它去做這樣的事情。

[2560x1440]
因此我們這次的實地越野測試就顯得更加有意義了,它能讓大家更全面的了解這些豪華SUV的真實實力,并且能看到這些產品能力上的差別。除了像蘭德酷路澤、第四代發現和大切諾基這些主打越野性能的產品之外,Q7、ML、途銳甚至是寶馬X5這些平日里看上去文質彬彬的大家伙們也同樣有著一定的野外生存能力,只不過它們的能力有高有低。
| 車型 | 奧迪Q7 | 寶馬X5 | 奔馳ML | 大眾途銳 | 蘭德酷路澤 | 大切諾基 | 第四代發現 |
|
手動選擇 駕駛模式 |
● | - | ● | ● | ● | ● | ● |
| 低速四驅 | - | - | ● | - | ● | ● | ● |
| 輪間限滑 | ● | ● | ● | ● | ● | ● | ● |
|
懸架高度 調節 |
● | - | ● | ● | - | ● | ● |
|
最大離地 間隙(mm) |
265 | 222 | 285 | 300 | 225 | 285 | 310 |
| 車身結構 | 承載 | 承載 | 承載 | 承載 | 非承載 | 承載 | 非承載 |
| 接近角 | 24 | 28 | 31 | 33 | 25 | 34.3 | 37.2 |
| 離去角 | 25.4 | 22.5 | 29 | 33 | 20 | 27.3 | 29.6 |
那我們如何判定這些豪華SUV越野能力的好壞?一方面是考察其實際野外道路上的脫困能力,險惡的環境下能夠帶你走出困境才是SUV的核心價值,這點在我們這次的測試當中已經全部展示了。當然,還有一個隱性的因素也很重要,那就是一副扛得住摔打的好筋骨,能夠走入險途,又能夠毫發無損的全身而退才是真正的好產品,就好比蘭德酷路澤和第四代發現這類產品。我想這些內容這對于那些打算入手豪華SUV的朋友來說,會有一些參考價值。

當然,我們的對比內容還未結束,接下來在本周還會發布第三期內容,其中包括了各種體驗環節的橫向對比,以及這些車型駕駛和乘坐舒適性的評價,同時我們還對他們的續航能力進行了測試,最后還有所有車型總得分排名,到時候我們就能知道到底哪款豪華SUV的綜合實力最強,敬請關注!
