從SUV誕生的那天起,它就一直被人誤認為是越野車的全新分支。這一切或許是因為它們與傳統越野車近似的外形,亦或許是因為它們都采用了四輪驅動系統。但是,SUV真的可以與越野車分庭抗禮嗎?答案顯然是否定的,兩種車型有著截然不同的特性。

提到RAV4,我想很多人應該不會把它與普拉多或者蘭德酷路澤混問一談吧。雖然在豐田的官網中,它們都被放在了SUV的品類之下。為什么會給人帶來如此不同的印象呢,其實從RAV4產品誕生初期就已現端倪。豐田將RAV4作為新車型推出的時候,明確將其定位為了適應城市環境的休閑運動車型。多年來幾代車型的演變也基本遵循了這一產品定位,在宣傳推廣過程中也幾乎從沒有去強調它的越野性能。那么,為什么要給一輛偏向城市的車型搭載四輪驅動系統呢?這是因為四驅系統可以讓車輛在鋪裝路面上具有更好的操控特性,同時對于安全性能也有一定提升。

新一代RAV4在強化運動特性的同時,對于其四驅系統的升級受到了外界的關注。如果你對于新RAV4還不太了解,請點擊下圖查看我們之前對其的試駕報道。本文則將關注重點放在了考驗其四驅系統的環節上。首先,我們還是來簡單了解一下RAV4搭載的這套四驅系統吧。
在官方資料中,全新RAV4搭載了一套名為動態扭矩分配控制4WD系統。它所強調的革新在于增加了DTC動態扭矩控制技術。這項技術能夠在車輛過彎時對方向盤轉動角度、車身姿態以及節氣門開度等數據進行分析,然后在VSC車身穩定系統的幫助下對扭矩進行主動分配,提升車輛循跡性能。聽上去如此厲害的四驅系統其實維持了傳統的結構,仍然依靠多片式離合器來進行前后軸之間的動力傳遞。

全新RAV4延續了以往的理念,采用了一套適時四驅系統。在傳動結構上,它沒有硬派越野車所必備的差速鎖,也沒有在變速箱內集成利于放大低速扭矩的齒輪。驅動形式上一般越野車偏重于后輪驅動,而以RAV4為代表的城市SUV一般以前驅平臺進行打造。
此類車型在鋪裝路面正常行駛過程中,系統會將扭矩只分配給前橋,此時車輛為前輪驅動模式;如果有輪胎出現打滑現象,系統會對扭矩進行重新分配,此時后橋也能夠獲得發動機輸出的扭矩。駕駛者也可以根據需求將車輛手動鎖定為四驅模式,此時扭矩將以恒定比例分配給前后橋。



從外形上看,全新RAV4使用了豐田“KEEN LOOK”設計語言,整體更為動感前衛。這種設計加上它固有的城市SUV定位并不影響RAV4擁有同級當中具有優勢的接近角/離去角數據。29°的接近角比直接競爭對手本田CR-V更大,22°的離去角則與對手持平。而在最小離地間隙數據上,RAV4以173毫米的成績讓老對手完全沒有還手之力。但這些就意味著RAV4一定比它的對手擁有更好的通過性能嗎?
要回答上述問題,我們還得看看RAV4腳下的裝備。豐田根據配置等級的不同選擇了鄧祿普和普利司通的兩款產品作為國產全新RAV4的原廠配套輪胎,兩款輪胎分別對應17英寸和18英寸輪轂,胎寬和扁平比各有不同。但無論是鄧祿普GRANDTREK ST30,還是普利司通動力俠,它們的相同點都是屬于各自品牌下主打靜音及操控性能的產品。作為原廠配套輪胎的它們舞臺在鋪裝路面上,就不要奢求其在非鋪裝路面的性能表現了。
_ueditor_page_break_tag_在之前的試駕環節,我們已經就全新RAV4的加速和制動性能進行了測試。也了解到了輪胎在極限測試條件下的表現,這次我們將用高速繞樁來考驗輪胎在受到側向壓力時是否依然能夠提供足夠的抓地力。

由于豐田對于安全性較為看重,因此相關車輛安全的電子輔助程序均無法完全關閉。駕駛者通過中控臺上的按鈕執行關閉VSC的動作時實際只是將VSC系統的寬容度進行了大幅提升,但其在檢測到車輛動態異常時還是會及時介入,消除事故隱患。

于是,我們就在這一前提下對RAV4進行了高速繞樁測試。測試過程中車輛受到VSC的庇護,很難出現推頭和車尾大幅擺動的現象。輪胎的表現令人滿意,在強大的側向壓力下,四條輪胎的胎壁都能夠提供足夠的支撐力,沒有出現胎壁摩擦地面的現象,保證了車輛始終具有足夠抓地力。
VSC以自己的邏輯保持車輛穩定的做法無可厚非,但其介入表現卻值得商榷。其他車型采用的車身穩定程序在介入時比較輕柔,甚至能夠做到悄無聲息的就將車輛拉回正常軌跡。RAV4的VSC則太想體現自己的存在感了,所以它總是以非常激進的方式介入。比如在繞樁過程中偶爾出現小幅推頭或甩尾屬正常現象,我們也能夠讓車輛出于可控范圍。但在RAV4上這種行為被判定為危險,VSC會粗魯的對車輛進行制動,完全不允許有絲毫失控的苗頭出現。
_ueditor_page_break_tag_
利用繞樁測試完成熱身之后,等待RAV4就是真刀真槍的四驅測試了,為此我們祭出測試神器---四驅測試臺。四驅測試臺由多組滾輪組成,我們可以對其進行靈活組合,以模擬單側雙輪打滑及3車輪打滑的不同狀態,借此來考察車輛四驅系統在應對上述狀態時的實際性能。
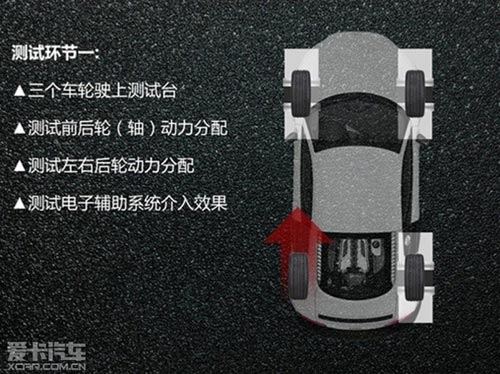


在第一個測試環節,我們將車輛置于測試臺上,模擬除左后以外的其余三個車輪打滑的狀態。此時,車輛開啟VSC,陡坡輔助和四驅鎖定功能默認關閉。掛入D檔并踏下油門之后,發動機轉速受到限制,右側置于測試臺上的輪胎勻速旋轉,左前輪同時轉動,左后輪則完全沒有驅動力,車輛無法擺脫困境。


之后,我們關閉了車輛的VSC系統,保持其他狀態不變再次進行了嘗試。發動機轉速限制解除,右側車輪開始高速旋轉。由于左前輪依舊打滑,因此電子系統起到了一定的限滑作用,對輸往該車輪的扭矩進行了限制,輪胎呈間隙轉動狀態。至于唯一與地面接觸且具有抓地力的左后輪依舊紋絲不動。
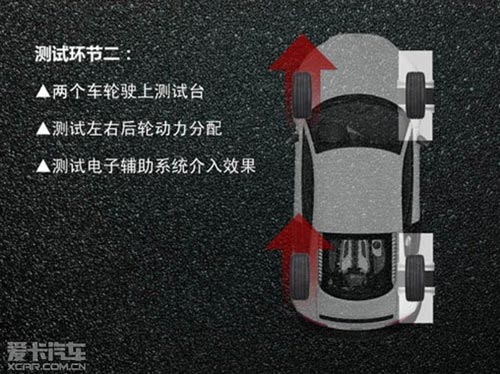


進入第二個測試環節,我們減去了放置在左前輪下的測試臺,讓車輛左側兩個車輪都與地面接觸,并且我們開啟了車輛的四驅鎖定功能。第一次嘗試還是在開啟VSC的條件下進行,此時車輛的發動機轉速被限制在2000轉以內。右側兩個車輪勻速旋轉,左側車輪獲得了發動機輸出的扭矩,但電子限滑系統不時對打滑一側的車輪進行制動,以將動力更多轉移至有抓地力的左側車輪。在經過一段時間的躥動后,RAV4終于在VSC的幫助下,將更多動力傳至附著力更強的一側,讓車輛得以前行。


反而,在關掉VSC之后,車輛的電子輔助系統不再發揮作用,發動機轉速不再受限。右側車輪快速旋轉,但是左側車輪卻一直維持不動。可見RAV4上的這套四驅系統,在失去VSC的輔助后幾乎失去了意義。
經過一系列的測試,全新RAV4通過了模擬的單側濕滑路面的考驗。但正如我們之前所說的那樣,它從一開始就不是將脫困和越野作為研發目標。在豐田的產品定位法則中,讓一輛城市SUV跟普拉多那般具有穿山越嶺的能力是不現實的。所以,在買車之前需要明確你的購車目的:希望擁有一輛外觀潮流時尚、空間充裕且操控感受還不錯的SUV車型,全新RAV4不會讓你失望。希望更強的越野性能,那還是追加些預算去選一臺普拉多那樣的越野車吧!
